Les cartes électroniques
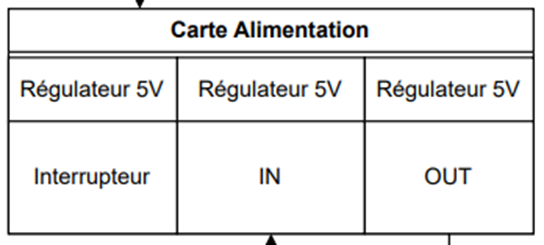
Carte alimentation
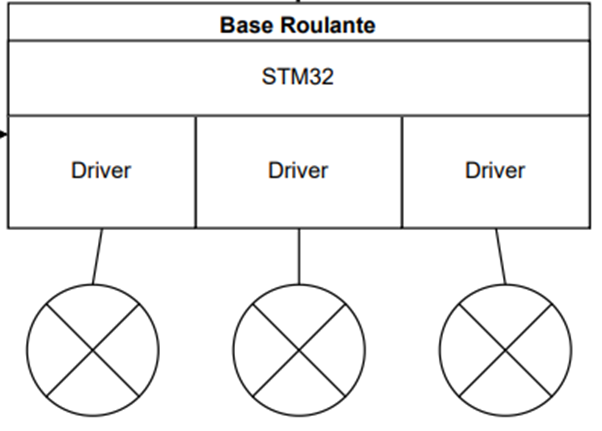
Carte base roulante
Carte Bus CAN
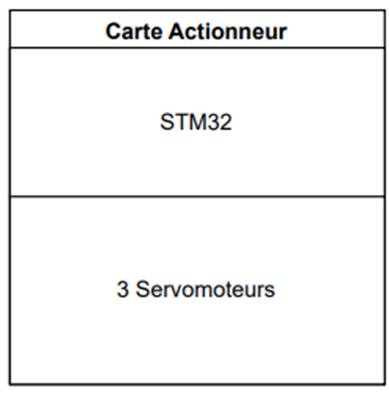
Carte actionneur (Montage en cours)
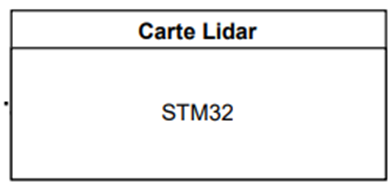
Carte Lidar
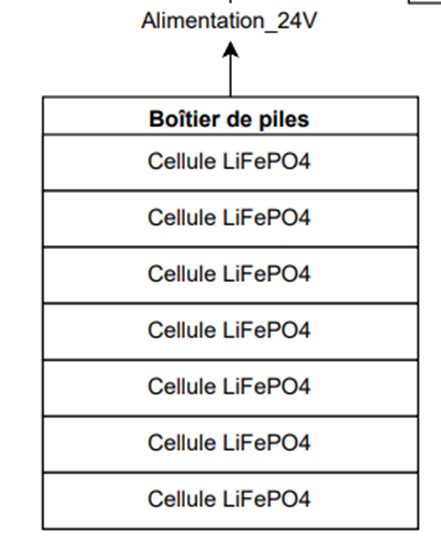
Boîtiers de piles
Carte odométrie
Carte Gyroscope
Carte des poteaux (En cours de réalisation)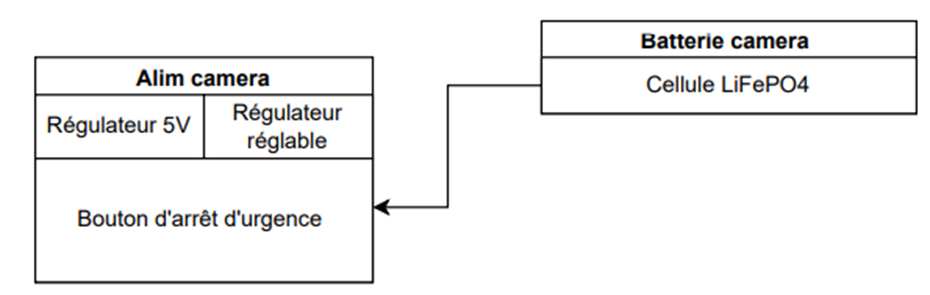
Travail à effectuer
- Faire les cartes + batteries pour les tours (avec impressions 3D des boîtes)
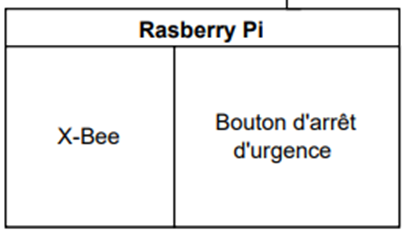
- Positionner les boutons d’arrêt d’urgence
- Montage carte actionneur
- Faire l’ensemble des câbles
- Connecter l’interrupteur à la Xbee du robot
Travail fait
- Le bouton d’arrêt d’urgence connecter à la Xbee arrête le relai, soit l’alimentation mais laissera la Rasberry Pi allumé, donc n’arrête pas le code
- Carte actionneur PCB réalisé
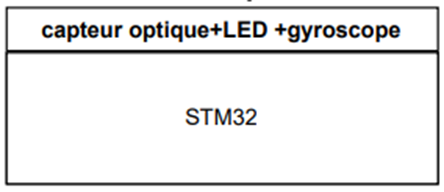
- Carte anti collision (capteur optique, LED, gyroscope) et Lidar : ce sont les mêmes cartes juste avec des composants différents.
- Carte actionneur PCB
Idées
[Vide]
Problèmes à éviter
[Vide]
Achats à effectuer
[Vide]