Présentation générale
Des tags ArUCO (en rouge) sont placés sur le plateau et les éléments de jeu. Pour situer ces tags, des modules sont placés sur des balises (en bleu ou jaune) : 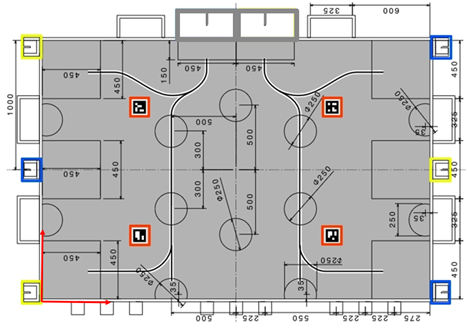
Plateau de jeu 2024
Chaque balise est montée d'un module contenant :
- Une caméra
- Un module XBee (S1 Pro)
- Une batterie LiFePO4
- Un Raspberry Pi Zero (OpenCV et OpenCV contrib)
Installation
Pour utiliser la librairie ArUCO, il faut installer :
- La librairie custom XBee
- La librairie OpenCV avec OpenCV contrib :
# Installe Cmake
sudo apt install cmake libgtk2.0-dev
git clone https://github.com/opencv/opencv.git
mkdir opencv/build && cd opencv/build && mkdir modules
git clone https://github.com/opencv/opencv_contrib.git
mv opencv_contrib/modules/aruco modules
cmake -DOPENCV_EXTRA_MODULES_PATH=./modules ..
sudo make install # Ajouter -j3 accélère la compilation mais peut faire crasher la Raspberry PiATTENTION
Le processus d'installation peut prendre plusieures heures sur une Raspberry Pi. Il est aussi possible de cross-compiler OpenCV (non testé).
Calibration
Pour avoir une meilleure détection, il est nécessaire de calibrer la caméra :
- Définir les paramètres dans
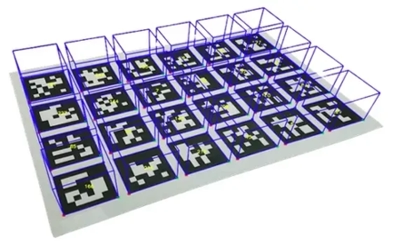
data/config.yml - Générer une grille ArUCO avec
./ArUCO board - Démarrer la calibration avec
./ArUCO calibrate - Prendre plusieurs point de vue avec
c - Calculer les paramètres en appuyant
ECHAP
Si tout s'est bien passé, un fichier data/camera_params.yml a été créé contenant les paramètres de la caméra (matrice de projection, distorsion, etc...).
Utilisation
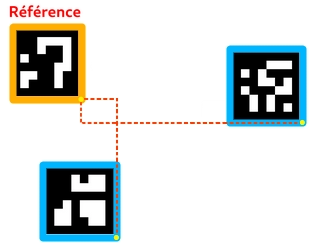
./ArUCO estimate permet de lancer le script de détection et d'estimation de la position des tags ArUCO. Les paramètres sont repris de data/camera_params.yml et data/config.yml et les positions sont données par rapport à un tag de référence (ref_marker_id).
| ArUCO Estimation | ArUCO AR |
|---|---|
 |  |